2025–2026
Push Back — Coach

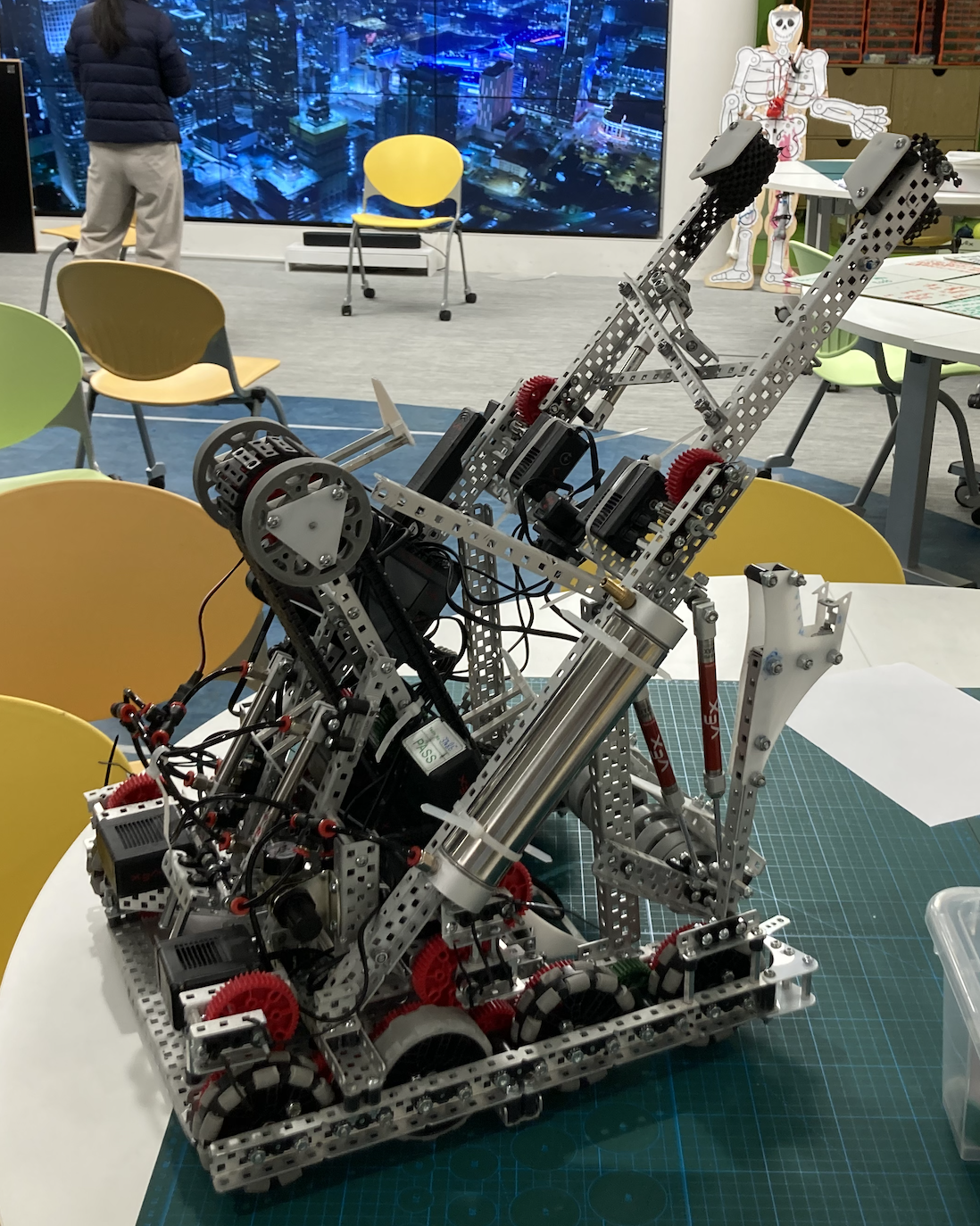
Robot Prototype
Built over the summer after the IB, this prototype focused heavily on weight minimization and efficient motor allocation. The unusual roller layout enabled ball output from five separate ports while using only 22W of motor power for scoring, allowing 66W to be dedicated to the drivetrain.
This was my final major build contribution before transitioning fully from captain to coach role.
Notebooks, Design Reviews & Mentorship
Led documentation and team organization across a roughly 280 page engineering notebook covering ANSYS simulations, path optimization using Bezier splines, pressure leakage calculations for live match strategy, and more. I designed the overall structure, maintained budget tracking and Gantt charts, and handled administrative workload. The full notebook is not shared publicly to avoid leaking team methods and competitive strategies.
2024–2025
High Stakes — Captain

Robot V1 — Prototype
Learning from the previous season, we upgraded to a six motor drivetrain instead of four, increased gearbox RPM from 200 to 600, and reduced wheel size. This more than doubled speed while increasing torque by roughly 1.7 times. We focused heavily on improving structural efficiency to save weight. The robot was ultimately left unfinished due to team restructuring.

Robot V2 — Hong Kong Tech Open
After team restructuring, we pivoted strategy to align with emerging game metas. This was one of the first designs we were genuinely satisfied with in terms of performance. We also ran static FEA in Fusion 360 for the first time due to extensive polycarbonate use.
🏆 Design Award at Hong Kong Finals
Robot V3 — VEX Worlds
A full redesign addressing major weaknesses from the previous robot. We tested extensively, including pneumatic leakage checks and friction optimization on intake rollers. Additional FEA was conducted, and many aluminium components were replaced with laser cut Delrin or polycarbonate to reduce weight. The final robot weighed roughly 62% of our previous Worlds robot while achieving significantly higher reliability.
Season Highlights
School events, Hong Kong Tech Open, and VEX Worlds




2023–2024
Over Under — Captain

Robot V1 — First Robot
Our first robot and our first experience with CAD. The design was intentionally built as flat as possible to crawl under the goal and descore. It featured two wide side panels and an extremely powerful central catapult, powerful enough to crack the ratchet gear twice. While not competitive, it functioned as a critical learning platform for the team.

Robot V2 — Hong Kong Tech Open
Its heavy and robust construction allowed us to block shots effectively and shove defenders aside. The upgraded catapult could launch two balls per second, which required two teammates to train specifically on synchronized loading.
🏆 Excellence Award at Hong Kong Finals

Robot V3 — VEX Worlds
A defense-focused robot featuring a foldout shield that nearly tripled the robot's height once deployed. Additional folding flaps were added to improve maneuverability. Unfortunately, axle sag over time combined with rough airline handling caused severe drivetrain issues. The robot required three consecutive nights of repairs until 4am to remain functional during Worlds.
Season Highlights
School events, Hong Kong Tech Open, and VEX Worlds



Three Seasons of Excellence
3
Competition Seasons
9
Robots Built & Iterated
2×
VEX Worlds Qualified